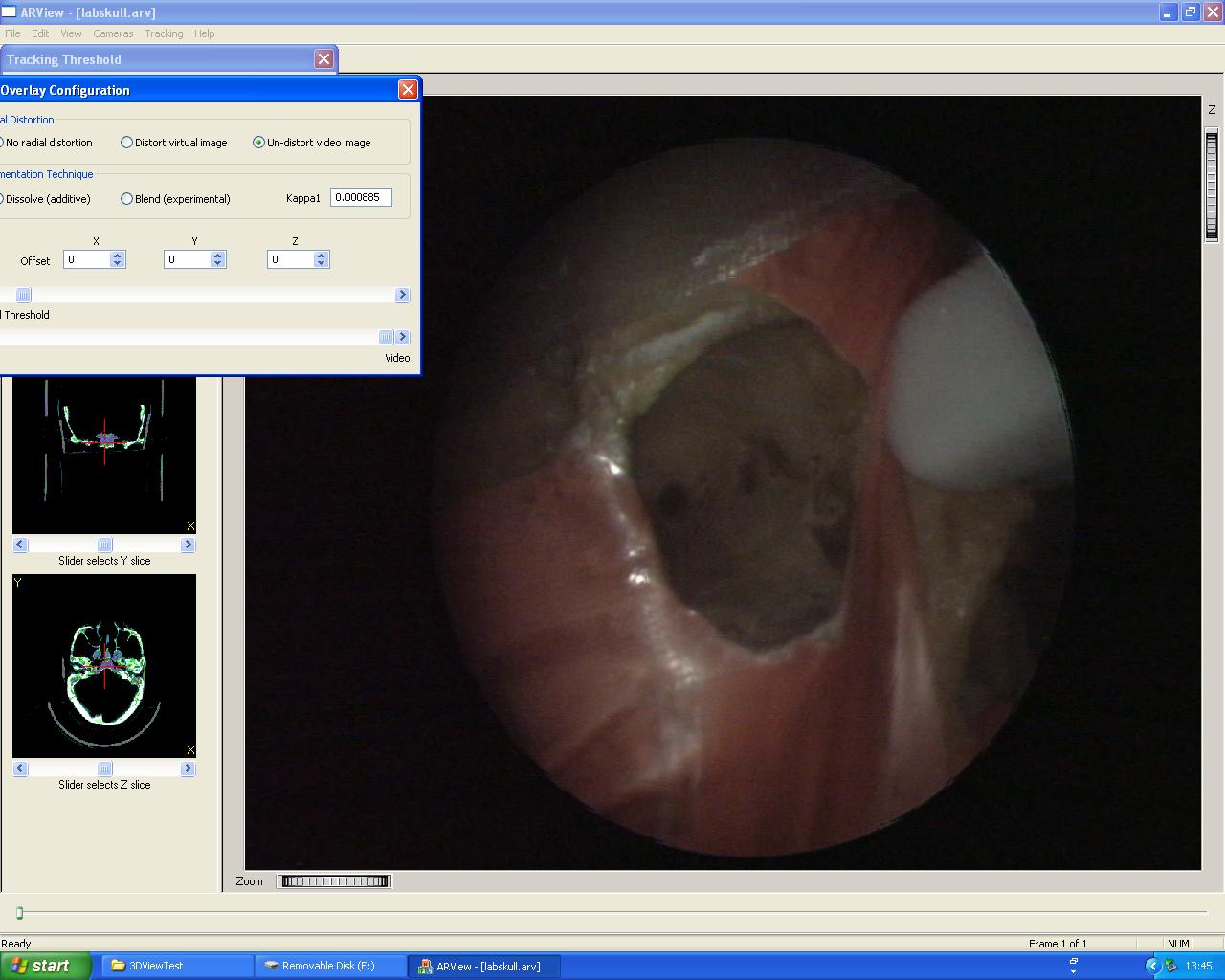
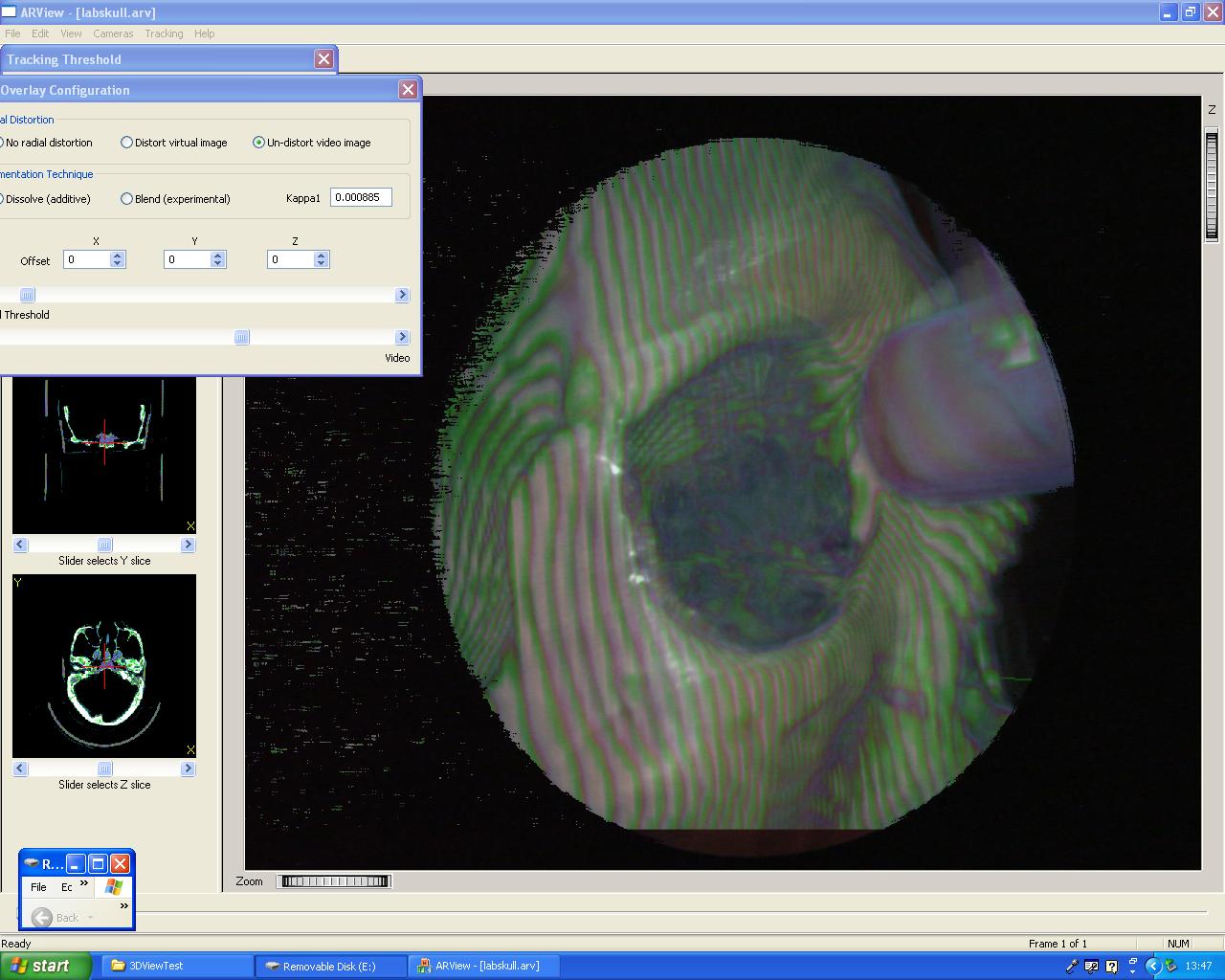
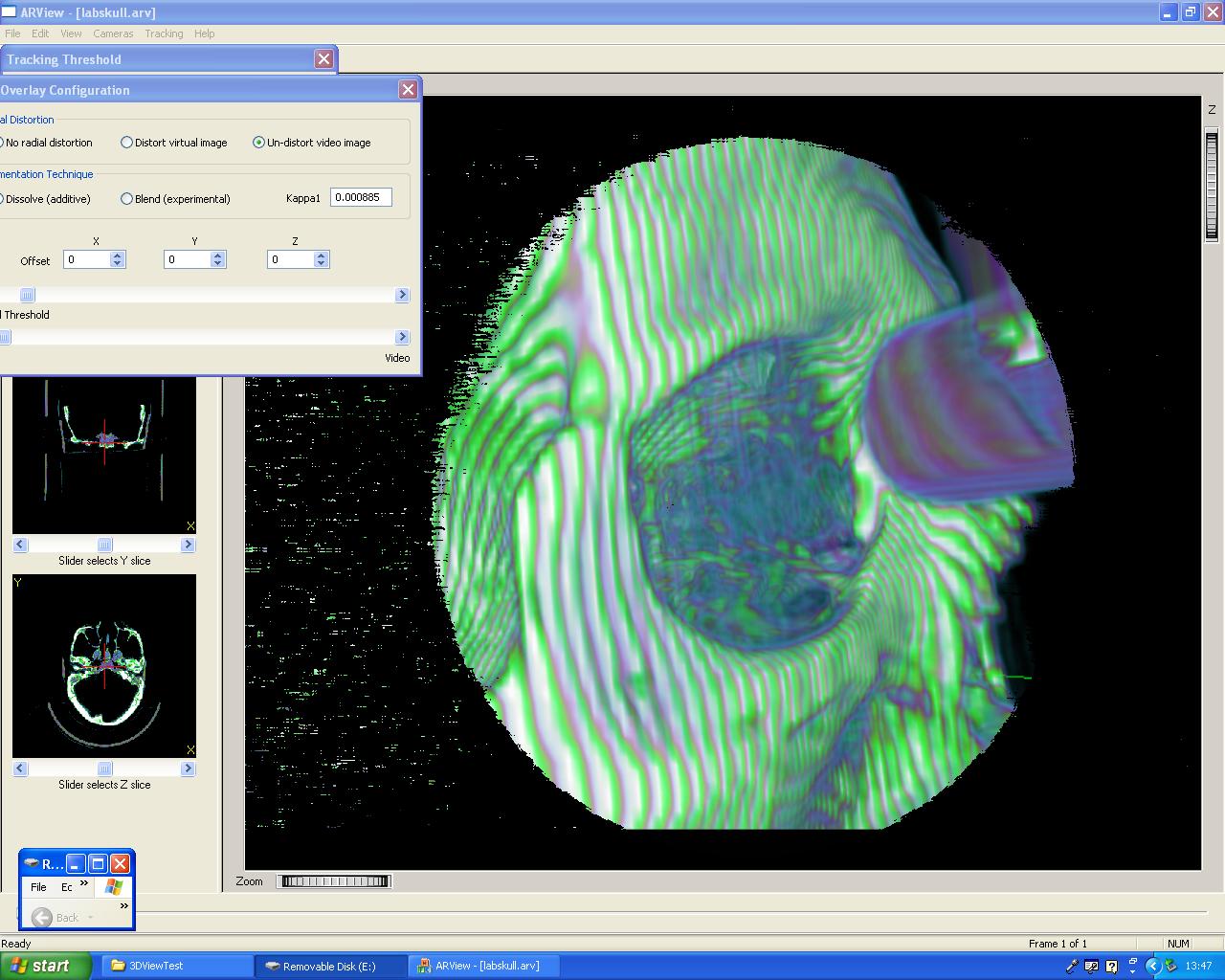
The calibration and registration steps create a static overlay between virtual and real image. We aim to keep the patient motionless, however, the visualisation devices such as the endoscope or microscope plus any additional surgical tools are moved, Hence once a static overlay is obtained, tracking is necessary for dynamic updates. We currently use the Northern Digital (NDI) Polaris optical tracking device. The static accuracy of the device is around 0.5mm RMS. This implies that the overlay error in the long run will get worse as tracking errors cumulate. The images below show an overlay whilst using a rigid endoscope. The overlay error is still within 2-3mm (worst case) after a number of motions within the working volume.
|